研究人员制作出史上最快的游泳软体机器人“Butterfly bots”
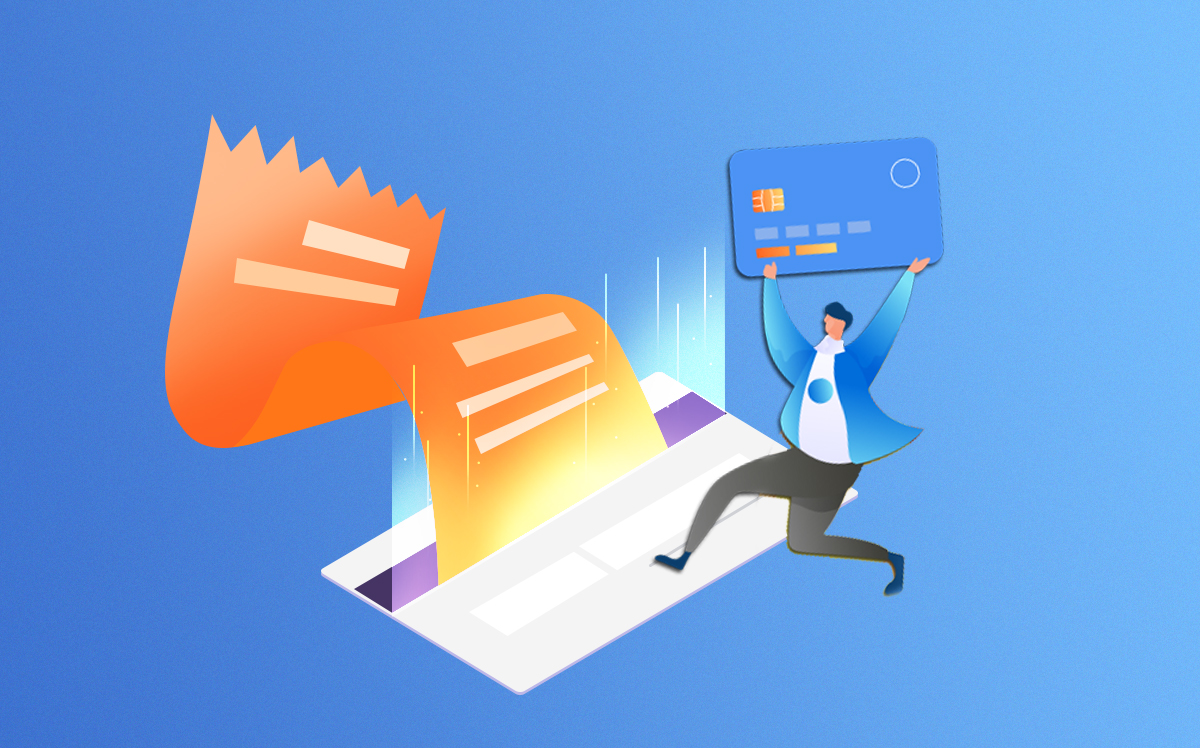
研究人员从蝠鲼的生物力学中获得灵感,开发了一种节能的软体机器人,其游泳速度比以前的游泳软体机器人快4倍以上。在北卡罗来纳州立大学(NC State)开发的这种机器人被称为"蝴蝶机器人",因为它们的游泳动作类似于人蝶泳时手臂的运动方式。
"迄今为止,游泳软体机器人的游泳速度还不能超过每秒一个身位,但是海洋动物--比如蝠鲼--能够游得更快,而且效率更高,"关于这项工作的论文的通讯作者、北卡罗来纳州立大学机械和航空航天工程系副教授Jie Yin说。"我们想借鉴这些动物的生物力学,看看我们是否能开发出更快、更节能的软体机器人。我们开发的原型工作得特别好。"
受蝠鲼生物力学的启发,北卡罗来纳州立大学的研究人员已经开发出一种节能的软体机器人,其游泳速度比以前的游泳软体机器人快四倍以上。这些机器人被称为"蝴蝶机器人",因为它们的游泳动作类似于人在进行蝶泳时手臂的运动方式。
 (相关资料图)
(相关资料图)
研究人员开发了两种类型的蝴蝶机器人。一种是专门为速度而设计的,能够达到每秒3.74个身位的平均速度。第二种被设计成高度机动性,能够向右或向左急转。这个可操作的原型能够达到每秒1.7个身位的速度。
"研究空气动力学和生物力学的研究人员使用一种叫做斯特劳哈尔数(Strouhal)的概念来评估飞行和游泳动物的能量效率,"该论文的第一作者、北卡罗来纳州立大学的新近博士毕业生Yinding Chi说。"当动物游泳或飞行时,Strouhal数在0.2和0.4之间,推进效率达到峰值。我们的两个蝴蝶机器人的Strouhal数都在这个范围内。"
蝴蝶机器人的游泳动力来自它们的翅膀,它们的翅膀是"双稳态的",这意味着翅膀有两种稳定状态。翅膀类似于一个扣式发夹,发夹在两种状态下都可以保持稳定的,在施加一定量的能量(通过弯曲它)之前和之后,当能量达到临界点时,发夹就会稳定地形成两种不同的形状。
在蝴蝶机器人中,受发夹启发的双稳态翅膀被连接到一个柔软的硅胶体上。用户通过将空气注入软体内部的腔室来控制翅膀在两种稳定状态之间的切换。当这些腔室充气和放气时,机身就会上下弯曲--迫使机翼随之来回摆动。
"以前开发扑翼机器人的大多数尝试都集中在使用电机直接向双翼提供动力。我们的方法使用双稳态翼,通过移动中心体被动地驱动。这是一个重要的区别,因为它允许简化设计,从而降低了重量"。研究人员表示。
更快的蝴蝶机器人只有一个"驱动单元",这使得它虽然游速非常快,但很难向左或向右转弯。可操控的蝴蝶机器人本质上有两个驱动单元,它们并排连接。这种设计允许用户操纵两边的翅膀,或者只"扇动"一个翅膀,这就是使它能够进行急转弯的原因。
"这项工作是一个令人兴奋的概念证明,但它有局限性,"研究人员称,"最明显的是,目前的原型被细长的管子拴住了,这是我们用来将空气泵入中央机构的。我们目前正在努力开发一个无拴的、自主的版本。"
这篇题为"高速高效、类似蝶泳的软体游泳器的系留"的论文将于11月18日发表在开放获取的《科学进展》杂志上。






- Win7系统哪个版本最稳定?绿茶系统 Ghost Win7 64位 流畅稳定版推荐
- 独特又好记的微信号有哪些?可以使用多个字母、数字、下划线等丰富组合
- 文字转语音播音系统哪个好?文字转语音播音王高效且使用简单
- dnf界面输入法图标不见了 如何更改键盘才能再次显示
- 穿越火线带空格的名字怎么输入?借助输入法Page down键就能实现
- WinXP系统玩游戏缺少d3dx942.dll文件 下载游戏运行环境安装包即可解决
- 迅雷下载任务包含违规内容无法下载 修改hosts即可解决迅雷无法下载问题
- Win10电脑突然出现explorer.exe错误 建议尝试「干净启动」电脑
- 设备管理器里没有网络适配器怎么回事?网卡驱动没有安装该怎么办
- 笔记本怎么外接独显?外接前准备请仔细阅读
- Win7旗舰版COM Surrogate已经停止工作怎么办 如何使用数据执行保护方法解决
- 彻底删除ie8的方法发布 删除后会对系统造成影响吗
- 怎样把Flash音乐转成MP3?所包含图像和字体等文件也可以导出吗
- pdf文件打开是乱码怎么办?需要下载并安装对应字体文件
- 笔记本风扇噪音大怎么办?系统设置中哪一项可以解决问题
- Mountain Lion启动U盘的详细制作教程发布 制作完成后可用于升级Mac电脑
- 怎么更改文件类型?如何为所有文件添加扩展名
- WinXp系统怎么安装微软雅黑字体?下载解压后需要装到哪个文件夹
- win10应用商店闪退打不开怎么办 新教程帮你解决烦恼
- 如何查找qq聊天记录?如何灵活应用“消息管理器”
- win7系统提示无法初始化选定的扫描仪 详细解决方法来了
- Win10系统怎么设置NFS服务器 安装NFS客户端后还需做什么
- 本地连接受限制或无连接是怎么回事?建议“查看网络连接”查明当前状态
- 台式电脑怎么安装和拆卸内存条 注意卡口要对准卡扣要扣好
- 事业脑女人都得长这样?
- 我在红山动物园,有一只小熊猫女儿
- 电脑错误代码0x8007007e怎么办?这样操作就能使我的电脑正常运行
- B站与金摇杆奖官方达成合作!国内玩家也可参与投票-环球热资讯
- 抓图软件哪个好?菲汀淘宝一键抓图工具功能强大
- PS黑五特惠来袭!商家充值卡集体涨价 玩家:预料到了-精彩看点
- 西安装修公司排名十强(西安装修公司排名)
- 显卡风扇响噪声大的原因:显卡散热需求或风扇损坏都可能成为原因
- win10任务栏开始菜单等系统图标点击无反应 可尝试卸载冲突软件
- Windows10系统怎样修复?可利用文件检查工具或是在线修复
- 11月18日16时海南临高今天疫情最新消息 11月18日16时海南临高最新疫情情况
- win7系统台式电脑怎么调屏幕亮度 建议使用显示器面板按钮调整
- win7如何给文件设置密码 具体步骤都在本文
- 教你设置win7打印机IP地址和端口的步骤 设置方法简单一看便会
- 2000元电脑主机配置清单亮相 并附带详细说明
- 天天来图书馆学习都要化妆的女生是什么心态?
- 抖音黄v认证可以修改吗如何取消 抖音黄v认证是永久的吗
- |用u盘装win7系统iso教程发布 这些安装准备必不可少
- Wi-Fi 6E市场势头强劲,6 GHz频段整体需求上升
- Adobe Reader是什么软件?为免费、易用的PDF文件阅读软件
- 不知道如何制作音乐相册?推荐两个免费制作音乐相册方法
- 魅族16Xs什么时候发布配置怎么样:具备对称屏大容量等四大优势
- ps3是什么多少钱:实际为PlayStation 3简称 市场价格2600元
- iphone5手机壳如何选购?不同手机壳材质有何注意点
- iso镜像可以直接安装吗 如何安装才能够正常使用
- 《生化危机3:重制版》云游戏今日发售 可下载试玩版体验-天天视点
- 印尼网约车巨头GoTo将裁员1300人 约占员工总数12%
- 吴谨言紫衣古风大片惊艳出圈!《诗经》美人的千姿百态
- 抖音黄v认证有什么好处 抖音黄v认证多少钱怎么弄-全球头条
- win7如何用键盘代替鼠标 找到“使键盘更易于使用”窗口即找到解决办法
- 诺基亚6320怎么样 该款式市场参考价格为100-150元
- 吴京代言中兴Axon 40 Ultra航天版手机 参数配置曝光
- 艾美特干衣机怎么安装 连接管与定位塑料条如何使用
- 23岁中老年模特5年在北京买了套房,这是怎样一个被命运选中的幸运儿?
- 三维制图软件有哪些 三维制图软件AutoCAD极受欢迎
- 电脑网络不稳定老掉线的解决方法上线 确定为系统问题时可这样解决
- 三星i997怎么样?定位大屏单核手机 支持4G网络
- 领先北美!阿凡达2曝光12月15日首映
- 电脑转VGA接口时如何设置屏幕最佳分辨率 并避免无法识别显示器情况
- Win10提示没有权限使用网络资源 解决方法介绍
- win7如何查看显卡驱动版本 打开入显卡属性切换到“驱动程序”即可
- 十大win7 64位旗舰破解版下载排行榜出炉 前三下载量均超过十万
- 车主给特斯拉脚踏板安装记录仪 网店已经开售相关产品
- 【手慢无】荣耀14.2英寸笔记本5900元 2K屏幕全金属机身-环球今亮点
- ios7升级出现activation error解决方法:推荐下载6.1.4 或 6.1.3(4S)固件
- 尼康相机怎么样 最大功能在于具备自动对焦 外观设计具备优势
- gmail邮箱登陆不了怎么办 可使用QQ邮箱添加账号并代收
- 索尼xperiazu手机测评体验 外观较xperia系列有所改变 屏幕变大
- 电脑无法打开NETGEAR路由器管理界面 新手用户可参考方法解决难题
- 永辉自有品牌节“好物欢乐颂”活动收官:线上销售同比增长近80%
- 新笔记本电脑怎么装系统 如何使用U盘PE启动盘装系统
- OPPO Reno9系列采用6.7英寸120Hz OLED超清曲面屏-环球速看
- CCTV6将播动画电影《普罗米亚》:明天早上9点
- 突发 彭博社爆料暴雪和网易决裂真实原因
- 微信8.0有哪些新功能?表情新增 浮窗将支持收藏笔记等
- LightSail 2任务在完成3年的太阳能航行演示后宣告结束
- 《无主之地》开发商收购新IP:独立佳作《雨中冒险》-当前消息
- 混乱的Taylor Swift巡演售票工作发生后 Ticketmaster面临反垄断审查
- 三星990 Pro旗舰SSD今日正式开售!1TB售价1099元-环球观热点
- qq邮箱群邮件功能下线 将于12月10日起终止服务-环球热议
- 省电智能手机有哪几款?OPPO N3已具备充足技术条件
- ROG玩家国度与暴雪娱乐官宣推出ROG 6暗黑破坏神:不朽典藏限量版手机
- 空调开多少度最省电 其实空调没调高1℃就能省电10%
- 联想拯救者R9000P 2022游戏本测评:锐龙7 6800H与RTX 3070 Ti王炸组合!
- 慧都智能制造APS,赋能「钣金行业」提升数字化战斗力!-全球时快讯
- 方太抽油烟机eq01t怎么样:核心特点为自动巡航增压模式 排量高
- 【手慢无】学习好物 联想小新Pad Pro1898元-消息
- 如何辨别山寨苹果手机 可审查手机串号或是检查外壳
- 佳能镜头介绍以及推荐 EF 24-70mm f/2.8L II USM名号响当当
- 押注运动游戏赛道 望尘科技能否乘势而起?
- 帅康燃气灶怎么样:产品款式新颖 且燃气灶火力强
- 电视无线耳机推荐 森海塞尔RS180无线耳机可轻松应对各场景使用
- 青葱metal手机参数介绍 将搭载4G RAM+128GB ROM配置惊人
- 工业微波炉多少钱 CNWB-2X工业微波炉设备价格达到14000元
- 中兴Axon40 Ultra 航天版官宣!硬件捅破天
- 卢伟冰:小米新旗舰产品力很强 配置能把人吓坏
新闻排行








精彩推荐
超前放送
- 研究人员制作出史上最快的游泳软...
- 今日11月18日23时山西忻州疫情新...
- 《坎巴拉太空计划2》将有多人模...
- 11月18日23时湖北仙桃疫情防控最...
- 《使命召唤:战区2》上线爆火!...
- 11月18日天津津南区疫情最新通报...
- 11月18日北京通州区疫情实时最新...
- 干货|为头发,你做过哪些有意义...
- 《黑相集:心中魔》前20分钟演示...
- 《原神》新一期拾枝杂谈 莱依拉...
- 《英雄联盟》官方实锤当红主播开...
- 今日11月18日21时河南三门峡疫情...
- 11月18日21时云南曲靖疫情防控最...
- 贝恩资本收购日系女装SNIDEL母公司
- 长颈鹿可以多久不喝水蚂蚁庄园答...
- 锤哥还将回归MCU 但下次出演雷...
- 曝大众正开发氢燃料电池汽车 续...
- 1米2标准电脑桌秒杀 仅111元-环...
- Wi-Fi 7首款路由器开售:双万兆...
- 地球首次大规模灭绝主因或揭晓 ...
- RTX 4060显卡遭曝光:定价3000...
- 三星27寸IPS显示器大促 秒杀799...
- 电脑椅限时半价 秒杀价99元包邮...
- 11月18日广西贵港疫情防控最新消...
- 11月18日湖北荆州疫情最新通告今...
- 《赛博朋克2077》推出股票Mod:...
- iPhone 14销量不尽人意!传苹果...
- 以AI为名 向心出发| 科大讯飞...
- 男子嫌网购假币难用自学PS造假币...
- 艾梅柏受到含LGBTQ在内的130多个...
- 红米K60外观曝光!颜值反杀小米13
- 曝小米产品经理已经换上小米14新...
- 疯狂小杨哥再陷虚假宣传风波:带...
- 披荆斩棘的男人 会选择什么样的...
- 基于高能μ介子粒子的革命性技术...
- 11月18日重庆江津区今日最新疫情...
- 11月18日重庆巫山县疫情最新通告...
- 斯宾塞称圣诞节期间XSX很难买 ...
- 京东物流第三季度营收357.7亿元...
- OPPO Reno9系列现已上架 可以预约
- 爱奇艺8月苍兰诀播出期新增用户...
- 网易俯视角射击新游《Cygnus En...
- XSS不影响《卧龙》开发 加入XGP...
- 《无尽的拉格朗日》主题音乐入围...
- 【手慢无】小米新品显示器399元...
- 苹果用夸克怎么下载视频 夸克...
- 比亚迪回应海豚空调吹出白色粉末...
- 注意更新!Win10/11紧急更新修复...
- 【手慢无】折叠键盘 ipad移动办...
- 11月18日18时内蒙古乌兰察布今天...

