爬墙机器人 Magnecko 就像壁虎和蜘蛛的杂交品种
 【资料图】
【资料图】
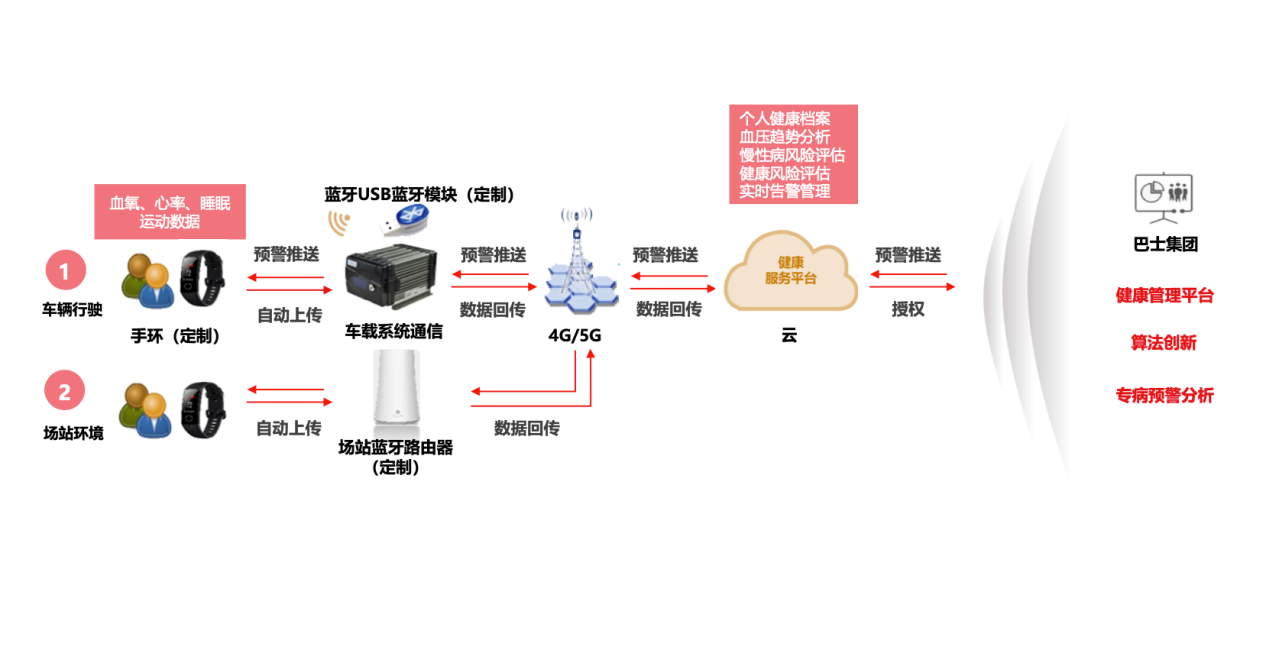
对高大的金属结构或机器进行检查时,人很难近距离亲自操作,虽然无人机可以提供帮助,但其有限的电池寿命是个问题,这就是磁性四足 Magnecko 机器人要解决的问题。这款四足机器人由瑞士苏黎世联邦理工学院(ETH Zurich)的八名工程学本科生组成的团队创造,其灵感来自壁虎的爬墙和爬天花板能力。
不过,壁虎使用的是名为"刚毛"的细小毛发状脚板结构,而 Magnecko 使用的则是 ETH 机器人系统实验室开发的特殊电永磁模块。
每个模块都由多个较小的磁铁组成,可以通过短电脉冲在几分之一秒内反复磁化和消磁。重要的是,磁铁在这两种状态下都不需要任何电力。磁化后的磁力也非常强大,仅一只脚就能承受机器人总重量的 2.5 倍。所以,这台机器可以完全倒立行走。
近距离观察机器人的一个弹簧式橡胶垫电磁脚 Magnecko/ETH Zurich
在目前的版本中,Magnecko 需要操作员使用无线手持控制器告诉它该去哪里。尽管如此,机器人还是会自己沿着这条路线前进,在垂直和水平的铁磁表面上自主转换行走方式。弹簧加载的橡胶脚垫可以帮助它在行走时保持牵引力。
按照计划,该机器人将能够自主避障和规划路线,而且它最终可能不只是检查结构。
团队成员尼古拉斯-费希(Nicolas Faesch)告诉我们:"我们计划先让机器人做好检查工作的准备,但这并不妨碍它将来进行自主维护或远程操作维修。它可以支持几公斤重的载荷,而且采用昆虫式构造,可以根据需要轻松定位。监视也是一个非常有趣的使用案例,因为机器人可以在一个地方悬挂多个小时来执行任务,这要归功于特殊的磁性脚,它不需要任何电源就能保持磁性。"
机器人可配备各种传感器,包括深度感应摄像头 Magnecko/ETH Zurich
目前,Faesch 及其同事正致力于改进这款机器人,并与行业专家讨论实际测试事宜。您可以在下面的视频中看到当前原型的运行情况。
另一个磁足墙壁行走四足机器人的例子是韩国科学技术院的 MARVEL。





- 这届年轻人,不再惯着“水果刺客”
- 首届链博会加拿大路演活动举办
- 杭州公安破获一起以亚运名义伪造印章招募保安案件
- DC《超人:传承》新演员加盟:鹰女、绿灯侠等
- 第三届汽车行业人才培养院长论坛举行
- 平安信贷是正规公司吗(平安信贷)
- 重新认识明星和综艺的关系
- iqoo12参数配置曝光:2K高频调光直屏 有16GB+1TB版本
- 全柴动力:7月11日融资买入686.66万元,融资融券余额4.68亿元
- 椰树简笔画图片(椰树简笔画)
- 荣耀手表4价格参数曝光:46mm版1499 元 支持双卡双待
- 视频通话7秒钟被骗30万!AI换脸骗局破解方法分享
- 古代病的残留物可能会加剧ALS
- 我国特医食品企业勇闯全球千亿级产业蓝海
- 用AI教人说“土味情话”,RizzGPT快速冲到美国iOS生活榜二
- 半次元正式停服 至今已运营了九年
- 国联证券给予中国太保买入评级,扬帆再启航,迈向新征程,目标价格为40元
- 左手IP右手服务,深圳女孩Halo的视频号之路| 明析视频号
- 瑜欣电子7月12日快速反弹
- 骑手捂住宝宝耳朵进KTV送餐 网友看完感慨:生活不易
- 成都大运会期间 浙江494家景区向四川人减免门票
- 长沙银行:7月11日融券卖出2.89万股,融资融券余额3.91亿元
- 每天预约参观人数达上限 中国大运河博物馆迎来“暑期档”
- 2022年我国企业数字化采购率升至8.26%
- 山呼海应 东莞力量 | 谢谷龄:推动玉屏县全域铺开教育协作示范共建工作
- 上海一机动车检测站内外勾结,为重型半挂车“替检代检”,12人落网
- 韩日两国领导人今在立陶宛会谈,或讨论核污水排海事宜
- 极简主义科幻模拟游戏《Cliff Empire》推荐
- 《星空》A卡配置推荐公布:RX7600畅玩1080P
- 8月25日前海南拟全面上线旅游消费投诉先行赔付
- DC新片《蓝甲虫》终极预告释出:超英新面孔亮相
- “领头羊”计划做强资本市场“广州板块” 未来3年新增75家上市企业
- 衣鱼虫对人的危害大吗(家里的衣鱼虫子是怎么来的)
- Phone 15 Pro新增“绯红色” 苹果15基础内存256GB
- 子宫内膜癌治疗有了新方式
- 祁阳:提高防范诈骗意识 筑牢财务安全屏障
- 虹口区青少年阅读节又来啦!
- “初升高”如何无缝衔接?新生心态如何过渡?听听“过来人”怎么说
- 电磁炮才是军舰上的理想武器?中国电磁炮可百公里击穿80毫米钢甲
- Brabus 750 Bodo Buschmann Edition 是一款配备三辐轮毂的 Mercedes-AMG SL 63
- 特斯拉中国再发新产品:一款玩具摩托车
- 小米cc9pro充电没有灯的吗
- 富士康195亿美元建厂计划泡汤 印度无惧:完全不影响半导体雄心
- MacBook Air 2020款5999元
- 128G手机存储够用吗?网友吵疯了
- iQOO 12手机参数曝光:2K高频调光大直屏,提供16GB 1TB版本
- 小米MIX Fold 3曝光:上罕见5倍长焦
- 戴尔15Pro笔记本优惠时刻
- 联想Y9000X限时特卖7488
- SSD等暴力涨价大幕将开启:存储市场回暖 部分主控芯片供不应求
- 机械师电竞本疯抢中
- 港股概念追踪 | 暴买730亿!央行黄金储备“八连增”黄金战略配置地位提升(附概念股)
- acer 宏碁传奇Go优惠好价
- 长安汽车:融资净买入2296.23万元,融资余额23.88亿元(07-11)
- 2022款MacBook Air优惠抢购
- 沪深股通|国光电气7月11日获外资卖出3033.0股
- 华兰生物(002007.SZ):贝伐珠单抗已申报生产并获受理
- “非遗+”撬动文旅产业发展大市场
- “生成式AI”搅动千行百业 上市公司争相布局
- 电商打卡“采梨节” 直播赋能促振兴
- 福建石油直分销终端销量大幅增长
- 三伏天流行“晒背养生”?医生重要提醒→
- 侏儒工程学和地精工程学哪个好(侏儒工程学和地精工程学区别)
- 增添“含绿量” 提升“含金量”——重点行业企业加快节能降碳行动扫描
- 陌陌账号注销之后(陌陌注销账号再注册信息还在吗)
- 打造智能制造新高地 沈阳机器人产业发展势头正劲
- 教程 | 这个夏天不太热~ 清凉款夏日小背心
- 宽80厘米还没有扶手,悉尼地铁紧急通道被批“太窄”
- 专家:2023年或成有气象记录以来最热的一年
- “世界上最神秘的鸟”首次现身连南 存世仅1000只左右
- 【环湖赛风景】你好,环湖赛!
- 木火铁锅炖鱼村(对于木火铁锅炖鱼村简单介绍)
- 支持无电支付 碰一碰就能付款!数字人民币APP上线新产品
- 用户数量超1亿!Threads上线103小时突破1亿大关
- 本田官方发布认证婚戒:7000元一枚
- 微软强制升级Win11 22H2版本 10月10日后不再推送安全更新
- 玩不到一天就会爱上这款游戏!《EA Sports FC 24》发布
- 美股三大指数集体高开 新能源汽车股走强
- 恒指夜期收盘(7.12)︱恒指夜期(7月)报18761点 高水101点
- 高德地图标记多个地址(高德地图标记多个地点)
- 电脑的ctrl键用不了(电脑ctrl键失灵)
- 纺织概念股票板块分类盘点!(7/11)
- 广东打出青年就业创业“组合拳”
- 手机相关知识:手机图片上怎么加文字
- 戴尔37.5寸带鱼屏显示器上市:8999元
- R7+32GB+1TB配置仅2899元 这款迷你电脑值得买吗?
- 仅699元巴掌大小的迷你电脑怎么样?亲身实测告诉你答案
- 神舟迷你主机性价比高吗 结果可能不太一样
- 越来越多人家不用油烟机了!如今流行这种灶,美观实用不占地
- 我国“绿氢”生产迈入万吨级
- 联想 昭阳X3-14 i3 1215U 8G 256G
- HP锐15 轻薄本限时好价
- 1000元以下超低价电脑真的不能买吗?实测699元850克超迷你主机
- 郑州“雨天模式”正在待命,接下来的雨这样下......
- RTX4060游戏本真是智商税?对比3060后果断入手
- HP 14寸巨屏笔记本仅售1.1万
- 惠普战66五代直降1000元
- 2.8K屏+13代酷睿 仅990克的商用本值得入手吗?
- 哈勃望远镜带来对UGC 11860星系的超新星发现
- 宏润建设(002062):7月11日北向资金增持17.83万股
新闻排行








精彩推荐
超前放送
- 英特尔否认酷睿CPU涨价传言:暂...
- 新华社权威快报丨“中国天眼”首...
- 创新的纳米液体泡沫缓冲技术有望...
- 爬墙机器人 Magnecko 就像壁虎...
- IDC Q2数据:国内智能机出货量...
- 上海人最馋这口冷饮!一定要现做...
- 全球连线丨西部陆海新通道海铁联...
- 快乐8第2023195期四胆全拖预测:...
- 空军以独特空中礼仪欢迎新飞行学...
- 中移物联OneNET 3个案例入选202...
- 趣味喵屋 盛夏寻梦!来《天谕》...
- 蚓螈奇怪的"喂皮"行为是为了帮助...
- 一图盘点2023下半年金科16个即将...
- 关于嘉实中证500交易型开放式指...
- 国内油价调价窗口26日开启 或迎...
- 内蒙古第六届残运会暨特奥会举重...
- “夜经济”点燃玉树烟火气
- 桂花网:多参数身体体征监测物联...
- 招募ing!第七届茗视光眼科助教...
- 向凌云教授受聘为马达加斯加共和...
- 海艺AI:迎合“AI时代”发展潮流...
- 布局产业新高地!海星医药健康创...
- 未来五年500亿投入打底,北汽蓝...
- 【展会直击】华秋慕尼黑上海电子...
- 桂花网蓝牙网关助力司乘人员职业...
- 【关注2023乌鲁木齐马拉松】一路...
- 热点 | 疫苗接种“送上门” ...
- 2023年辽宁省养老金调整方案最新...
- 因违反信披规定 旋极信息(30032...
- 2023年上半年我国造船三大指标全...
- “深圳-深汕”城际巴士换“新装...
- 电影《封神第一部》举办“筑梦”...
- zai菜什么意思?
- 打卡2023 ChinaJoy,八位堂(8B...
- 1.5小时充满100公里 宗申摩托森...
- 为政以德譬如北辰居其所而众星共...
- 美国人给亚洲鲤鱼改名为Copi 做...
- 《奥本海默》首波口碑解禁:好评...
- 顾家家居为各国媒体记者提供深睡...
- 全球最大镓买家:客户正在蜂拥囤...
- 蔚来 NOP+功能全上线!
- 京东自营店和官方旗舰店哪个可靠...
- 鲁大师2023年PC半年报:AMD高端...
- 保定公交车只剩333辆如何支撑市...
- 交通运输部:截至6月30日 全国3...
- 太惊险!小孩从人行道突然跑出,...
- 湖南面向中小学生的非学科类校外...
- 金至尊铂金多少钱一克(2023年07...
- 《庆余年》!庆帝为何要隐藏大宗...
- 太空中的群体智能:NASA的Starli...
