Mori3模块化技术可以让宇航员现场制作他们需要的机器人|今日最新
 (资料图片)
(资料图片)
在狭窄的航天器或空间站中,通常没有空间来存放多个机器人,因为每个机器人都为特定任务而设计。 Mori3 系统的设计考虑了这一事实,因为它可用于根据需要创建不同类型的机器人。
Mori3 装置由 Jamie Paik 教授及其瑞士 EPFL 研究所的同事开发,由多个配备电子设备(如电机、电池和传感器)和机械耦合机构的平面三角形模块组成。 在称为多边形网格化的过程中,这些模块的组可以沿边缘连接在一起,形成一个三维多边形机器人。
该多边形的大小和配置会有所不同,具体取决于机器人需要执行的任务。 除其他外,它可以四足行走,将自己变成机械臂,或像轮子一样滚动。 此外,如果需要,多个这样的机器人可以相互连接,暂时形成一个更大的机器人。
一个单独的 Mori3 模块Christoph Belke,EPFL RRL
据科学家称,基于 Mori3 的机器人“擅长做机器人应该做的三件事”,即靠自己的力量四处移动、与人类用户互动,以及处理和运输物体。 希望它们最终可以用于协助航天器内的宇航员或自行进行外部维修等任务。
“相互连接以创建铰接结构的多边形和多态机器人可以有效地用于各种应用,”Paik 说。 “当然,像 Mori3 这样的通用机器人在某些领域的效率会不如专用机器人。也就是说,Mori3 最大的卖点是它的多功能性。”
一篇关于该技术的论文最近发表在《自然机器智能》杂志上。





- 环球快资讯丨俞敏洪简介父母 俞敏洪简介
- 谷歌 Pixel 8 系列更多信息曝光,屏幕或颇具看点
- 印度近期发生多起灾难事故和暴力冲突并出现伤亡,中国驻加尔各答总领馆发布安全提醒 天天讯息
- 全球今日报丨免票!面向全国退役军人!
- 全球观热点:端午送安康 传播文明新风尚
- 蔡少芬制服热裤路透照曝光 对镜头比耶少女感爆棚-环球快消息
- 听云南|临沧永德土佛 形状奇异如万年塔-环球头条
- 铅球加油稿一百字(铅球加油稿?) 世界今日报
- 新动态:吴宗宪曝光黄子佼黑历史,曾要求16岁美少女脱衣验身,还让他保密
- 世界观焦点:立方制药:盐酸丙美卡因滴眼液药品注册申请获受理
- 新的迷惑行为出现了:玩家请愿让《星空》成PS5独占
- 网络ip查询工具(网络ip) 全球视讯
- 喜马拉雅申请AI开放平台商标 世界焦点
- 环球最资讯丨水宝宝有毒吗孕妇可以玩吗_水宝宝有毒吗
- 环球快资讯:他从火光中走来百度云网盘_他从火光中走来百度云
- 芜湖人力资源和社会保障局官网查询(天津市人力资源和社会保障局个人查询)
- 调查称53.7%年轻人存款不足10万 每月3千是中等收入群体|头条焦点
- 焦点关注:江西瑞金市法院:多元解纷,让法治力量直抵人心
- 军魂的含义_军魂是什么简介介绍
- 人类勿扰!「养成系」沙盒AI社群爆火,Chirper.ai点燃赛博世界
- 【天天聚看点】狗狗嫌天热自己坐电梯回家 主人:找了好半天
- high school love on更新时间(关于high school love on更新时间的基本详情介绍)_天天要闻
- 废纸箱多少钱一斤最新价格_废纸箱多少钱一斤 速看料
- AppleWatchSE2再次创下亚马逊历史最低价|环球热资讯
- 环球热点!龙狙多少钱一把 龙狙多少钱
- 测评朗逸纯电及汉腾V7怎么样|当前头条
- 从江县丙梅街道:开展“感恩父亲节”绘画活动_每日热闻
- 属龙的属相婚配表女(属龙的属相婚配表)
- 环球关注:房地产项目营销策划(关于房地产项目营销策划的介绍)
- 宽带100兆和200兆区别费用_宽带100兆和200兆区别 世界即时看
- 绿米推出多功能智能门V100 兼容苹果HomeKit 环球焦点
- 讯息:荣耀研发专家:3840Hz零风险调光护眼屏 领先行业1-2代
- 湖北能源144.22万股股份回购及注销,注销日期为2023年6月16日 |环球看点
- 环球快资讯:中国究竟有哪些富裕城市呢?
- 华硕Zenfone将于10月发布: 5.9英寸+骁龙8Gen2处理器
- 新奇特 AR 吃鸡潮流运动 LET’S PIU 确认参展 2023 ChinaJoy BTOC|当前快报
- 环球新资讯:腾讯《剑来》电视剧概念海报 开心麻花为出品公司之一
- 全球信息:《金庸武侠世界》预告:周一围饰黄药师 明道饰洪七公
- 建筑师是做什么工作的_建筑师是做什么的
- 浙江绍兴首条自动驾驶公交投运 提供免费接驳服务_世界快报
- 环球微速讯:抖音评论区怎么发语音 抖音语音评论怎么设置
- 全球百事通!HKC发布两款全新电竞显示器 含首款OLED电竞显示器
- 6月19日金兰首饰黄金报585元/克 铂金360元/克
- 环球即时:鲍里斯二世_关于鲍里斯二世简述
- 马斯克:特斯拉离实现完全自动驾驶不远
- 时讯:卷王极兔,快递中间商难赚差价
- 大众汽车业绩计划:预计2026年实现100亿欧元增益 最新资讯
- 世界动态:花钱雇群演!楼市,开始自导自演了
- 理想设计师泄密 W01超前手稿展示新纯电MPV 世界热点
- 世界讯息:广汽埃安2024款AION V Plus本月底上市
- 福莱特(601865.SH)实控人累计减持福莱转债438万张
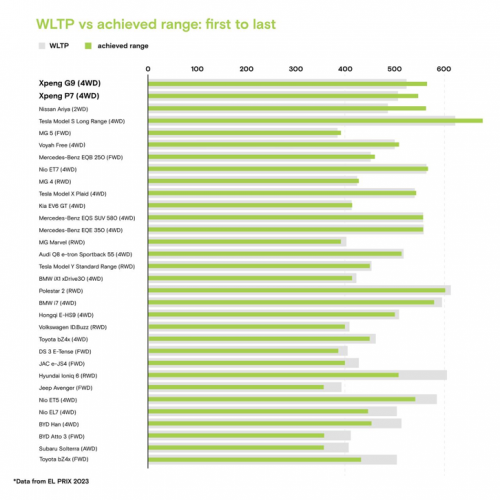
- 实力夺冠!小鹏G9拿下挪威NAF续航测试第一,充电测试破单项纪录
- 世界实时:关于教师绩效工资分配方案的想法与认识_教师绩效工资分配方案如何制定
- 大摩予小米集团-W“增持”评级 目标价15港元 微速讯
- 一加Ace 2 Pro把骁龙8 Gen2下放!同档位性能无敌
- Apple watchOS 10将引入高安全级别的锁定模式|世界新要闻
- 《南洋女儿情》什么时候上线 详细追剧日历每晚几点播出 全球热讯
- 黑客威胁要泄露从Reddit窃取的80GB数据
- 梦幻西游符石组合一览表文库_梦幻西游dt符石组合_环球精选
- 任贤齐演唱会退票收30%手续费 可能与遏制黄牛有关
- 用户成造车主角,北汽新能源锚定市场本质需求
- 南方多地迎入汛最强降水,长江中下游防汛压力骤增 每日讯息
- 昭衍新药(06127)拟每10股现有股份派送4股红股
- 天元宠物跌2.24%创新低 超募4.2亿元中信证券保荐
- 领导调动临别赠言
- 环球讯息:英语在线收费 线上英语收费
- 舞蹈考级有什么用途 舞蹈考级有什么用
- 【当前热闻】剧版《三体2》概念海报首曝!原班人马回归制作
- 2023淘宝拍拍乐怎么玩 淘宝618拍拍乐入口在哪 世界信息
- 欧美陶瓷价格及图片(欧美陶瓷地砖)_环球播报
- 头部券商交易系统出故障,无法交易长达半小时-环球即时看
- 前沿资讯!耳膜破了能修复期间喝牛奶(耳膜破了能修复)
- 《女神异闻录5 战略版》游戏详情发布 点燃内心的火焰! 播资讯
- 美好置业疾行扩张留下后遗症 转型5年如今游走退市边缘
- 财路、财位与财库 环球微速讯
- 天天热议:媒体人:张镇麟结束美国特训现身沈阳 将飞成都和林书豪参加活动
- 什么是好看的淑女穿搭?夏天手把手教你搭配,美丽又简单易学-天天微动态
- 这个618,“所有女生”不再只看李佳琦
- 教育部公布第二批国家级一流本科课程认定结果,吉林省多所高校上榜! 天天热资讯
- 净身离婚债务怎么处理-世界视点
- 杨立昆:生成式AI还不如狗聪明 这不应被视为威胁
- 安卓14 Beta 3或将原生支持手写笔功能
- 范德利特_关于范德利特的简介
- 王府井:股东三胞投资已完成1135万股股份减持计划
- 每日龙虎榜 | 期市资金日内净流出 PTA减仓位居榜首
- 美图发布AI视觉大模型奇想智能MiracleVision
- csgo一百个箱子加钥匙多少钱?csgo哪里买钥匙最便宜?
- 微信上线“安静模式” 为他们设置|世界要闻
- 天天热点!亚马逊已确认不再举办专门的re:MARS人工智能大会
- csgo开箱什么时候最容易出金?csgo如何白嫖一把刀?
- csgo开箱子必须充钱么?csgo买箱子和钥匙去哪个平台?
- 海沧交警开展电动自行车上牌便民服务 微动态
- 拼多多无货源一件代发怎么做
- 伊藤美诚身高是多少?公开资料显示,伊藤美诚身高1.5米-今日关注
- 世界热消息:省内顺丰快递多久能到 如果省外正常需要第2天或者第3天才能到
- CSGO开箱和直接买哪个实惠?csgo开200个箱子多少钱?
- 世界新资讯:2023年一季度杭州工业土地投资TOP50企业总投资近12亿
- 加氢苯商品报价动态(2023-06-19)|今日看点
- csgo开箱概率是如何算的?csgo聊天框怎么关闭?
- 碧螺春原产地 碧螺春产自哪里 它是否具有强心解痉的功效
新闻排行








精彩推荐
- 索尼总裁:使命召唤新作将登陆PS平台-独家
- 昇腾AI@吉林 | 昇腾AI创新大赛2023吉林赛区 环球观天下
- 【全球播资讯】火山引擎数智平台最新直播活动:ByteHouse技术架构与最佳实践分享
- 浙江绍兴首条自动驾驶公交投运 提供免费接驳服务_世界快报
- 绿米推出多功能智能门V100 兼容苹果HomeKit 环球焦点
- 理想设计师泄密 W01超前手稿展示新纯电MPV 世界热点
- 讯息:荣耀研发专家:3840Hz零风险调光护眼屏 领先行业1-2代
- 大众汽车业绩计划:预计2026年实现100亿欧元增益 最新资讯
- 迪士尼业务收入下滑严重,首席财务官麦卡锡宣布离职
- 世界速讯:万元神车又添一位!2023款奇瑞欧萌达正式上市
超前放送
- Mori3模块化技术可以让宇航员现...
- 摩尔庄园手游拉姆怎么携带_摩尔...
- 她直言讨厌中国,回国捞金上节目...
- 冠捷科技(000727):6月19日北...
- 香港举办青少年端午节嘉年华活动...
- 天天亮点!21岁零287天,萨卡是...
- 歙县中学 黄山歙县有哪些学校
- 资讯:被骗了怎样能追回钱财呢 ...
- 江西鹏翼传媒集团_关于江西鹏翼...
- 材质sus304是什么材料_材质SUS30...
- 全球球精选!lenovoLJ2200打印机...
- 环球焦点!哈尔滨现代公共关系职...
- 微盟集团(02013.HK):6月19日...
- 奔驰s级挡位怎么用_奔驰s挡起什...
- 起亚狮跑怎么样_狮跑油耗|环球微动态
- 建设银行密码输错3次第二天能解...
- 全球快看:打字录入平台_打字录入
- 相思的泪水在不停流淌是什么歌_...
- 热门:木质胶合板(木芯板与胶合...
- 小德劲敌开始备战温网!提前适应...
- 快播:阿联酋和卡塔尔宣布恢复驻...
- 什么是无限流量卡(什么是无限流...
- 草药学300以上在哪学_草药学训练师
- 股票600624
- 环球微动态丨中远船务工程集团有...
- 【环球聚看点】碎雪菜素炒怎么炒...
- 【天天新视野】陕甘川宁毗邻六地...
- 巴萨5选1,2800万+2添头!哈维钦...
- 每日头条!loe玻璃和普通玻璃的价...
- 世界最新:《庆余年2》多个词条...
- 环球热消息:停经年龄是多少岁(...
- 测甲醛多少钱一个房间_测甲醛需...
- 最高气温45.1度!印度3天内至少9...
- 110米跨栏世界保持者是谁_110米跨栏
- 第一届全国学生(青年)运动会定...
- 每日快看:“明天音乐节”时隔4...
- 法拉第未来首款车型FF91第二阶段...
- 奇迹格斗家攻略_奇迹格斗家 400...
- 曼努埃尔·洛卡特利(关于曼努埃...
- 今日关注:今日到账!大冶市“个...
- 天天头条:周冬雨是什么脸型发型...
- 环球微头条丨端午活动即将来袭!...
- 焦点简讯:左侧附件囊肿3cm怎么治...
- 首发4899元!外星人新款27英寸显...
- 索尼总裁:使命召唤新作将登陆PS...
- 中信证券600030 中信证券600030...
- 泰迪踢掉主人长了2年的肾结石 ...
- 生态环境部:1-5月全国地级以上...
- 全球今亮点!以下哪种行为不属于...
- 感冒感觉浑身没劲怎么回事_感觉...
