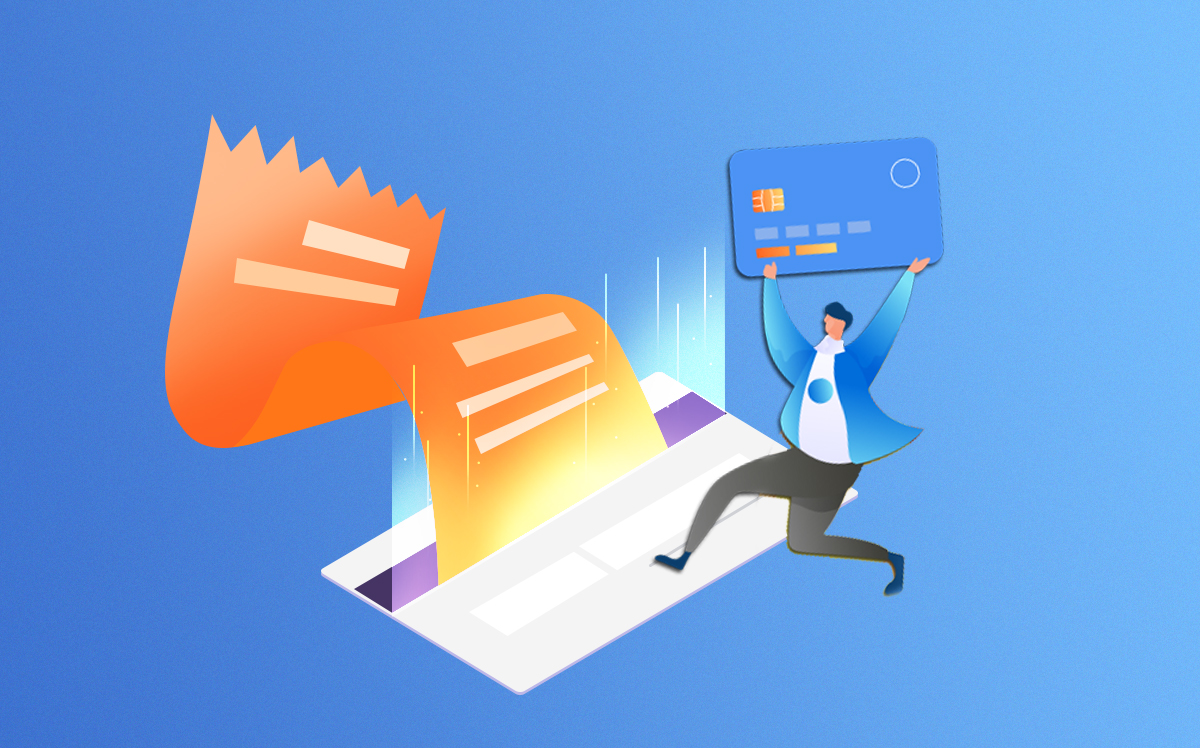
NASA革命性的低温操作部署臂(COLDArm)将用于未来的月球任务
 (资料图片)
(资料图片)
COLDArm,即低温下可操作的月球部署臂将大大改善月球登陆器的机器人手臂的效用。该机械臂将实现在非常低的温度下的操纵能力,包括在月球夜间,当温度可能下降到华氏零下280度(摄氏零下173度)。COLDArm正在由位于南加州的美国宇航局喷气推进实验室(JPL)开发。
该机械臂是为月球着陆器设计的,它利用了火星直升机Ingenuity使用的技术,可以在极度寒冷的温度下执行各种任务,而不需要加热装置。其动作可以包括诸如舀取和分析月球土壤,部署仪器,以及捕捉着陆器周围的照片。
目前月球着陆器的机械臂设计需要独立的加热器,以防止机械臂内的齿轮在暴露于月球夜里的极度寒冷的温度时产生压力和断裂。COLDArm的设计就包含了特殊的齿轮和电机控制器,可以在极端温度下运行,而不需要加热,因此,为任务节省了功率和质量。
这个草图显示了COLDArm设计的月球登陆器。资料来源:美国宇航局,JPL-加州理工学院
与凤凰号和洞察号的机器人手臂类似,COLDArm具有4个自由度级别(可移动的关节),大约6.5英尺(2米)长,可以产生大约10磅的力。嵌入在手臂"手腕"附近的一个传感器将测量和调节手臂在任何特定运动中所施加的力,以便在达到指示负荷时停止手臂,并保护手臂。该手臂将配备摄像头,用于三维测绘、月球表面成像和一般操作。
COLDArm团队正在评估可能在手臂末端操作的各种附件和小型仪器,包括一个3D打印的钛勺,其特点是收集月球岩石的岩土特性。这包括与NASA@Work"成为改变游戏规则的人"和向公众开放的"亲爱的,我缩小了有效载荷"挑战赛的获奖者合作,将他们的有效载荷仪器与COLDArm进行潜在的整合,以便将来进行演示。
这一切会最终产生可以被编程为自主控制手臂的关节,以执行各种运动并收集图片和传感器数据。通过未来的软件发展,COLDArm的设备可以实现在海洋世界(如木星的卫星欧罗巴)的自主操作。
COLDArm的齿轮正在大型金属玻璃齿轮项目下开发。在NASA小企业创新研究计划下,Motiv空间系统公司正在领导COLDArm的机械臂和电机控制器的设计和制造。展示这些技术将使未来的月球、火星和海洋世界的极端环境任务成为可能。
今年9月,在喷气推进实验室的一个充满模拟月球上的破碎岩石和尘埃材料的测试床上,COLDArm成功完成了评估其收集材料属性数据能力的实验。现在,COLDArm已被送去完成每项任务所面临的类似太空条件的严格测试。它的目标是在2020年代末发射。
COLDArm项目由月面创新计划(LSII)资助,并由美国宇航局空间技术任务局的游戏改变发展(GCD)计划管理。





- 纪录再一次被打破 零下250度环境i9-13900K冲上9GHz-天天消息
- 想要查看电脑历史使用记录该怎么做?win10电脑查看历史记录操作方法介绍
- CES 2023华硕预热 新款轻薄本将开启OLED屏幕新维度
- Win11记事本迎来“大升级”:将新增标签页功能-重点聚焦
- 网易UU加速盒子209元-环球微头条
- 武汉三镇:与中国足协黑暗势力斗争 具体详细内容是什么-全球新消息
- 韩国报告首例“食脑虫”病例 一男子感染身亡-环球快看
- 雷克沙时光机记录关于你的故事
- 自动调平 创想三维3D打印机1199-天天精选
- 65瓦快充!倍思氮化镓秒杀128元-当前快讯
- 《三体》动画口碑直降!豆瓣跌破6分 网友发现人脸模型重复利用
- 比亚迪KN95口罩 50只125元-环球今热点
- 华帝燃气热水器e2是什么意思啊(华帝燃气热水器e2什么意思)-每日速讯
- 特斯拉内置导航不再只找超充 第三方充电桩白名单
- 真我 GT 大师探索版推送 realme UI 4.0 正式版
- 联想拯救者刃7000K台式机开启预售 9999元起
- 运行在哪里打开快捷键(运行在哪里)
- 汕头社保局人工咨询电话(汕头社保局)
- 【手慢无】支持SSD+SATA双硬盘的惠普战99仅需5499元
- 豆瓣2022年度电影榜单出炉:《阿凡达2》入榜
- EPIC喜加一:国产之光3A游戏《暗影火炬城》免费送 省了108元
- 《西游记之七十二变》曝光终极预告:猴王造型呆萌
- 400美元一个赛季 NFL周日票首次登录流媒体
- 交错式HDR?Pixel8新技术细节披露
- 限制太多 网飞广告版用户并不喜欢
- 上海大众汽车朗逸价格多少-环球新消息
- 沃尔沃suv最新款是哪款-今头条
- 30美元 第三方透明Steamdeck后盖改善手感
- 不涉及管理层面变动 微博回应15亿收购新浪网传闻
- 【手慢无】5G WIFI全网通+超清贴合屏 第三星种平板电脑折后仅售820元-环球微动态
- 能读能写,才是传统纸笔的最佳替代品!小米电纸书Note评测-全球新动态
- 2022年底还喜欢骁龙8+手机?卢伟冰:等K60就行 还有2K屏
- AMD将于1月10日推出三款非X Ryzen 7000处理器
- 荣耀平板V8 Pro发布:首款天玑8100平板 2599起
- 有PS5手柄那味了:微软新Xbox手柄将加入触控板-今头条
- 【手慢无】英特尔NUC认证超值笔记本仅需2699元-全球速看料
- 气候变化推动了草食恐龙的崛起 使其成为统治者
- 韩版《风声》新剧照公布 网友:这次真不如国产-动态焦点
- 新冠肺炎更名为新冠病毒感染 具体详细内容是什么-天天视点
- 韩国人造肉需求激增:近一半韩国年轻人买过吃过-天天快资讯
- 24小时快讯速递:现在快递为什么这么慢-全球速递
- 建筑工程个人工作总结(建筑工程个人工作总结)
- 《使命召唤:黑色行动3》废弃的开放世界战役图像泄露 曾开发1年之久-每日资讯
- Redmi K60素皮版真机曝光 这颜色爱了!
- 02年小伙3年打6份工买车 正能量感染网友:送过外卖、做过服务员等
- 24小时快讯速递:极兔快递春节停运吗
- 7例收购!资本“野蛮人”突袭美妆
- 知网公布15项整改措施:解除独家合作协议 未来下调价格-全球观热点
- APS Holdings 宣布开发用于 AR/VR的30
- 副高级工程师职称评定条件及流程(副高级工程师职称评定条件)-视点
- 斩女黄多多,收割一大批泡芙脑袋
- 小米mini主机格外畅销 i5主机2799-播报
- 锂聚合物电池和锂离子电池哪个更好(锂聚合物电池和锂离子电池哪个好)-环球简讯
- 苹果有线耳机怎么接线(苹果有线耳机怎么激活)
- 2022最有魅力电影男主:吴京、张译、沈腾等-当前快讯
- 明星故事|利路修 他的淡定与清醒
- “2022知乎年度数码(家电)榜单”正式发布 成为消费决策重要参考-速看
- N多玩家插反PS5游戏盘!官方发文纠正
- 丹拿联合调音!一加Buds Pro 2无线耳机官宣:48dB深度降噪
- Redmi Watch 3新增蓝牙语音通话:电话直接腕上接听
- 首款鸿蒙生态手机WIKO5G准备就绪 12月27日正式发布!
- 拉勾招聘《2022数字化科技人才招聘白皮书》:超3成求职者愿与公司共患难 82%打工人可接受合规裁员
- CES 2023:宝马将展示 Dee 的相关内容,涉及人工智能-今日播报
- 《伊苏10》最新概念图曝光 亚特鲁回到17岁-天天百事通
- 倍思氮化镓65瓦秒杀128元-每日看点
- 家用好物选购指南:排插怎么选?认准这个标准很重要!
- 24小时快讯速递:淘宝直播带货怎么把流量做起来-全球通讯
- 找对2023年精准抗老方向,资深保养控高阶养肤品盘点
- 中关村在线荣获“2022中国数字化营销大会金牛奖”——最佳整合营销传播奖
- 知网被罚8760万元!但今年已中标上千个项目-世界热点评
- 当颜宇宙与潮流艺术碰撞,美颜相机虚拟衣服上线
- 小白初次上手3D打印机:ELEGOO Neptune3 Pro,操作友好效果出色
- 聚焦能源科技创新,探索绿色转型攻守之道
- 管鲍之交的故事主要讲了什么(管鲍之交的故事简介)-天天快报
- 【手慢无】小米最强旗舰路由器上市:售价1799元-焦点播报
- 【手慢无】价格击穿仅578元 梅捷2TB固态硬盘秒杀-世界新资讯
- 英国科技行业估值达1万亿美元 领先欧洲其它国家
- 红魔8 Pro系列发布:不止电竞 全能好用 3999元起
- 新款电动车续航65km仅售982元,下单即送7豪礼-世界热闻
- 暴降1700元!雅迪新国标仅售1799元-世界最资讯
- 梅西的加时赛进球无效 法国球迷要求重踢决赛?世界杯主裁晒图力证没有错误-全球热推荐
- 春夏秋冬的成语(春夏秋冬的成语)
- 桌面显示不清楚怎么才能设置最佳分辨率?电脑桌面设置最佳分辨率方法
- 电脑显示分辨率怎么点击都没有反应怎么办?电脑分辨率被锁定解决方法
- 怎么才能给电脑共享文件夹设置密码?共享文件夹设置密码的方法教程
- 系统桌面总是崩溃该怎么处理?电脑桌面崩溃的解决方法
- 7*24小时资讯:2023养殖什么最赚钱农村-热闻
- win10系统事件查看器在哪里可以找到?怎么打开事件查看器?
- 时髦办|谁看到New Jeans能不怀念青春啊
- 清除电脑上的使用记录防隐私泄露具体该怎么做?win10电脑清除使用痕迹方法
- 小米平板5升级安卓13:光子引擎来袭!
- 安装电脑字体失败问题该怎么处理?电脑字体安装失败解决方法
- 想把电脑字体换成默认的具体该怎么做?恢复电脑默认字体的操作方法
- 行业最快!红魔8 Pro搭载520Hz游戏肩键:毫秒级响应
- 电脑的网络属性应该怎么查看?网络属性查看具体步骤方法
- 需要查看打印机的IP地址该怎么做?电脑查看打印机ip地址操作方法
- 鼻+唇+下颏,如何提升美貌上限?
- 第二代骁龙8只是基础操作?一加11系列定档1月4日
- 外媒建议iPhone 15 mini回归,希望苹果一次发5款手机
- 抗击癌症的纳米粒子:与疾病作斗争的新武器
新闻排行








精彩推荐
超前放送
- NASA革命性的低温操作部署臂(CO...
- 男子iPhone掉地后冒烟炸开:刚充...
- 索尼为《Forspoken》大力宣发 ...
- 胃出血需要做啥手术(胃出血需要...
- 7*24小时简讯:2023农村最缺的生...
- 特斯拉中国大陆第 1 万个超级...
- 马斯克被曝架子大:访客等1个小...
- 不再是三星Galaxy S22独占:“...
- 顾客吐槽看《阿凡达2》需30元购3...
- 苹果中国新年福利开启:iPhone ...
- 解除电脑网络带宽限制操作方法教...
- Steam 上线 2022 年回顾报告...
- 电脑控制面板上帝模式怎么打开?...
- 不知道该怎么调显示分辨率怎么办...
- 使用快捷键分屏怎么操作?电脑使...
- 微念归还李子柒公司股权 刘同...
- 怎么通过ip添加网络打印机?通过...
- 电脑中多了一个WPS网盘无法删除...
- 虚拟机权限不足无法访问文件怎么...
- 想给鼠标换个样式该怎么做?更改...
- 在局域网看不到其他电脑该怎么办...
- 电脑隐藏的文件夹怎么显示出来?...
- 计算机没有用户和组不让添加该怎...
- 想设置电脑默认输入法该怎么操作...
- 知网被罚8760万元登微博热搜 网...
- 桌面的图标不见了该怎么解决?桌...
- 删除文件没有确认提示解决方法 ...
- 想把图标快捷方式几个字删掉该怎...
- 装潢设计专业软件(装潢设计专业...
- 便宜又实用迷你纳米加湿器只要9.8元
- win10系统自带播放器倍速该怎么...
- 危機重重 僅剩三成“脫歐”支持...
- 电脑屏幕不会自动关闭解决方法 ...
- 微软专利提出为AR眼镜用户识别属...
- 连接投影仪后屏幕上没有画面解决...
- 张艺谋新片《满江红》定档春节 ...
- 在安全模式输入密码时一直提示密...
- 7*24小时简讯:身上的痛让我难以...
- 电脑进入安全模式该怎么退出?Wi...
- 只读文件夹无法删除该怎么处理?...
- iPhone“车祸检测”占用大量救援...
- 不小心误删了注册表怎么办?恢复...
- 【手慢无】大牌触控翻转本限时直...
- 电脑连不上热点应该怎么办?Win1...
- 鼠标右键没有压缩文件选项怎么处...
- 怎么彻底关闭许可证即将过期窗口...
- 电脑上多出个pe系统干扰开机怎么...
- 关闭win10测试模式操作步骤分享...
- 批量修改文件名有什么方法吗?电...
- 双屏显示中有一个黑屏该怎么解决...

